De acuerdo con Fiore (2021), un amplificador operacional (OpAmp) se considera un amplificador multietapa de alta ganancia, ya que se puede una sola entidad. Estas herramientas tienen una entrada diferencial y una salida; asimismo, poseen una entrada que produce una señal de salida invertida y otra que emite una señal de salida no invertida. Para su funcionamiento, el amplificador operacional requiere de una fuente de alimentación bipolar, es decir, con dos valores de diferentes signos: una positiva y otra negativa. Los OpAmp pueden fabricarse enteramente a partir de dispositivos discretos, como transistores, y así fue por algunos años; por último, a finales de la década de los sesenta y principios de 1970, con los avances en semiconductores, fue posible miniaturizar el sistema, pues todos los componentes necesarios se integraron en un solo chip de silicio, denominado circuito integrado.
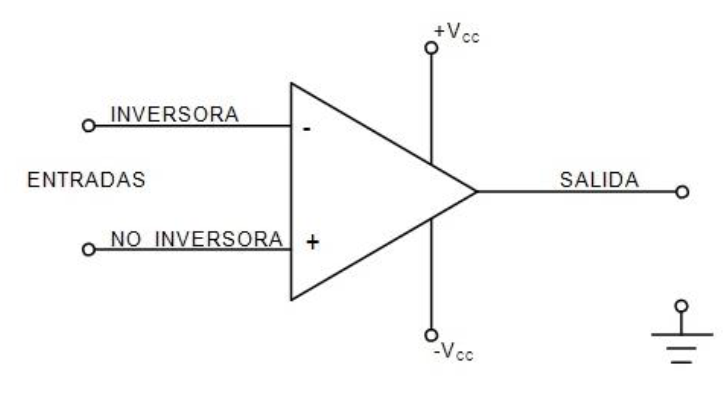
Figura 1. Símbolo del amplificador operacional.
Fuente: Vallejo, M. (s.f.). Adquisición de datos. Recuperado de https://tableroalparque.weebly.com/uploads/5/1/6/9/51696511/introduccion.pdf
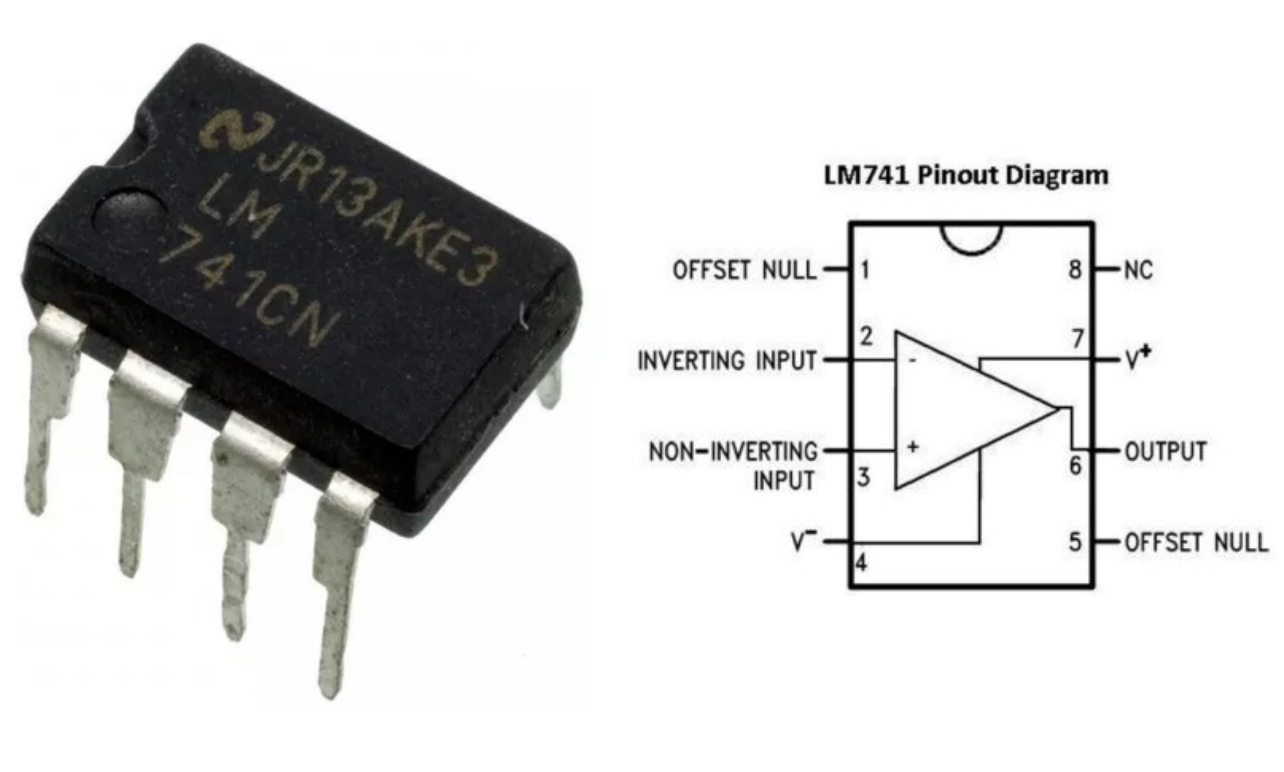
Figura 2. Circuito integrado que contiene un amplificador operacional.
Fuente: ROOSTECH. (s.f.). LM741 Amplificador Operacional 8PIN. Recuperado de
https://roostech.co/circuito-integrado/lm741-amplificador-operacional-8pin/
Sensores de señales eléctricas
Para establecer una diferencia entre dos conceptos que parecen similares, sobre todo al momento de hablar de sensores, se realizan las siguientes precisiones:
- Sensor. Dispositivo que, al recibir un estímulo, entrega como salida una señal eléctrica; dependiendo de cómo operen, se pueden clasificar como activos o pasivos:
- Sensor activo. Es aquel que requiere de una fuente de alimentación externa, por ejemplo, las RTD o celdas de carga.
- Sensor pasivo. Es aquel que no necesita de una fuente externa que lo excite, por ejemplo, los termopares o fotodiodos.
- Transductor. Se trata de un dispositivo que transforma un tipo de energía en otra, por ejemplo, un dínamo convierte la energía rotacional en energía eléctrica.
De acuerdo con EDS Robotics (2022), la respuesta de un sensor se usa para medir variaciones de variables físicas de un determinado evento o fenómeno, ya que se obtiene un resultado dependiendo del valor; por ejemplo, iniciar o finalizar partes de un proceso.
Los sensores más comunes son los siguientes:
- Sensores de distancia. Permiten medir la distancia entre dos puntos.
- Sensores de frecuencia de luz. Permiten medir impulsos luminosos y decodificar su frecuencia, lo que ayuda a detectar diferentes colores.
- Sensores de humedad. Al colocarlos en un área determinada, miden la temperatura y la humedad relativa en el aire.
- Sensor de luz. Es un dispositivo capaz de medir la luz ambiental, o bien, la que se origina desde un punto en concreto; luego, reacciona a ella con un impulso eléctrico, el cual varía dependiendo de la intensidad de la luz detectada.
- Sensores de posición. Permiten determinar la posición de un objeto con respecto a un plano, la cual puede ser lineal o angular.
- Sensores de presión. Determinan cuánta presión ejerce un fluido en un espacio determinado.
- Sensores de proximidad. Permiten determinar si un objeto se encuentra dentro del área de su medición, así como su cercanía con un punto de referencia (que puede ser el propio sensor).
- Sensores de sonido. Permiten medir la magnitud de las ondas sonoras del ambiente.
- Sensores de temperatura. A partir de un punto de referencia, determinan el incremento o decremento de energía calórica dentro de un área de trabajo.
- Sensores de velocidad. Utilizan un punto de referencia para determinar el tiempo que demora un objeto en cambiar su posición hasta el lugar deseado.
- Sensores magnéticos. Sirven para detectar la presencia de campos magnéticos y para determinar su magnitud.
- Sensores de corriente. Permiten detectar corriente en un sistema y convertirla en un voltaje de salida de fácil medición, el cual resulta proporcional a la intensidad eléctrica que circula en la trayectoria donde se coloca el sensor (element14, s.f.).
Acondicionamiento de señales: amplificación y filtrado
De acuerdo con Windmill Software (2022), el acondicionamiento consiste en una técnica que, a grandes rasgos, permite hacer que una señal de un sensor o transductor resulte adecuada para ser procesada por un equipo de adquisición de datos. Por ejemplo, si se mide una señal de voltaje muy pequeña, de apenas unos pocos milivoltios, es posible que sea necesario amplificarla; asimismo, si tuvieras una señal contaminada con ruido, debes filtrarla. El acondicionamiento adecuado es esencial para obtener una medición precisa de una señal y, por consiguiente, supone el primer paso para adquirir datos computarizados.
Tipos de acondicionamiento de señales:
Amplificación. De acuerdo con Omega Engineering (s.f.), la amplificación ocurre cuando aumenta la magnitud general de una señal, es decir, se incrementa la resolución de medición y la sensibilidad de la señal. Los acondicionadores de señal externos estratégicamente ubicados pueden magnificar el nivel de voltaje antes de que pueda verse afectado por el ruido ambiental; en este sentido, un ejemplo de amplificación es la conversión de una señal de 0 – 10 mV en una de 0-10 V. Los termopares y las galgas extensométricas son sensores que, normalmente, requieren de este tipo de acondicionamiento.
Amplificación con el OpAmp 741. Esta herramienta puede emplearse con dos configuraciones, según la necesidad en la señal de salida, ya sea que deba aparecer invertida (entrada negativa) o no invertida (entrada positiva). En este sentido, un concepto común para ambas configuraciones es la ganancia, es decir, el factor de amplificación requerido (voltaje de salida respecto al de entrada); en ambos casos, depende de dos resistencias usadas para polarizar el dispositivo.
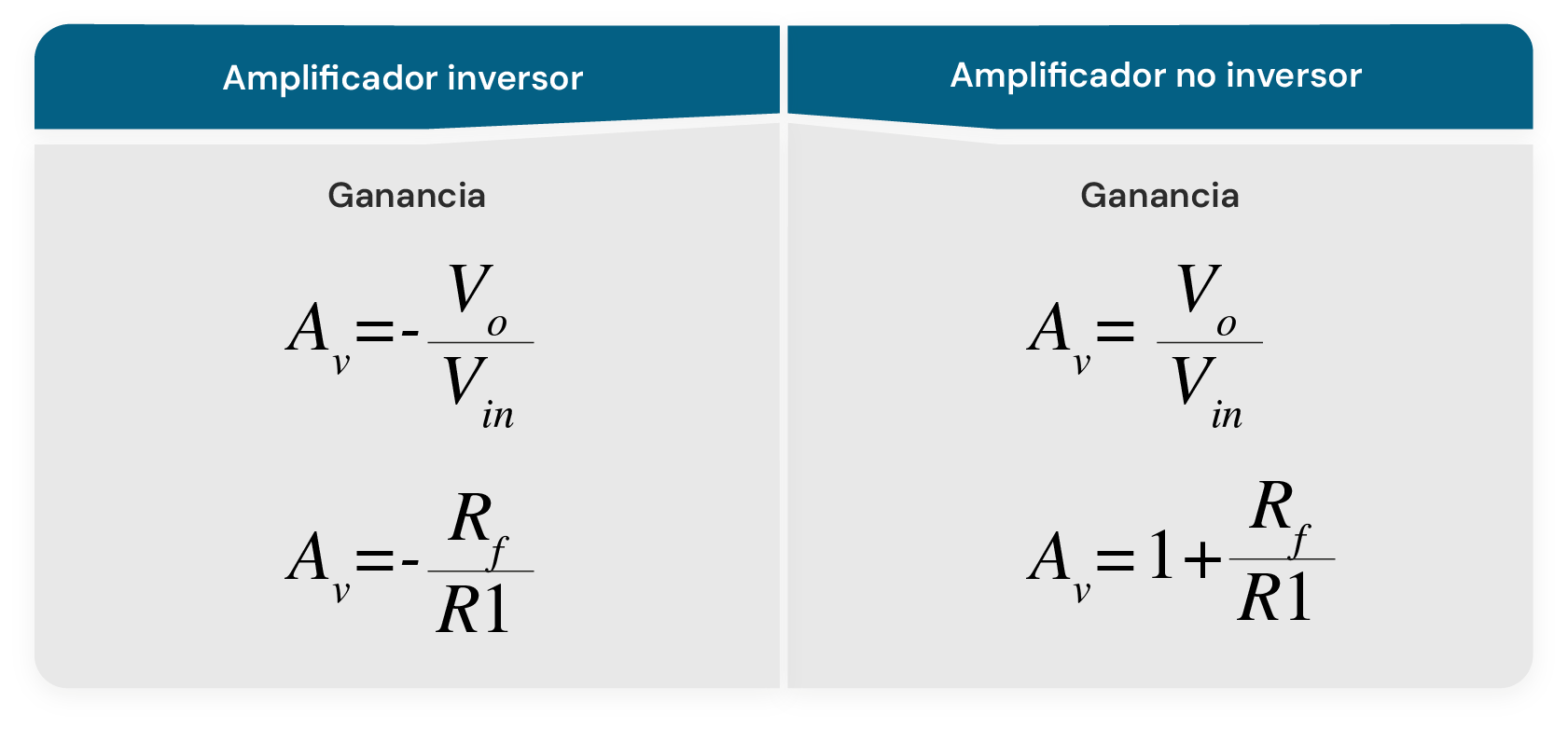
Tabla 1. Configuraciones del OpAmp 741.
Filtrado. Para el procesamiento de señales, el filtro se considera un dispositivo o proceso encargado de eliminar algunos componentes o características no deseadas de una señal; por este motivo, esta clase de herramientas suelen definirse en función de las frecuencias que dejan pasar como parte de la señal de salida. En consecuencia, se clasifican en filtros pasa bajos, pasa alto y pasa banda; entre ellos, uno de los que más se usa en mediciones de variables físicas es el pasa bajos, ya que permite frecuencias desde 0 Hz hasta la frecuencia de corte (fc) que se decida en el diseño.
Esquemas de control y automatización
De acuerdo con ElectronicsForu (2023), los sistemas de control se utilizan para regular el comportamiento de un dispositivo o proceso; además, se componen de tres elementos principales: un sensor, un controlador y un actuador. El primero detecta una cantidad física, como la temperatura, la presión o la posición y, después, la convierte en una señal eléctrica; el segundo procesa esta señal y genera otra de salida, la cual se utiliza para controlar el actuador; este último, mientras tanto, consiste en un dispositivo que traduce la señal de salida del controlador en una acción física, como abrir o cerrar una válvula, encender o apagar un motor, o bien, ajustar su velocidad.
Control proporcional. De acuerdo con Armenta (2022), el control proporcional (PC) es un sistema que funciona con un valor de referencia a mantener contra el valor actual que entrega el sistema; en este caso, el punto de ajuste es el valor objetivo para la salida del sistema, mientras que el actual equivale a la última medición de salida que se devuelve al controlador como entrada.
La diferencia entre el punto de referencia y los valores actuales se llama error y, por tanto:

El objetivo principal del controlador proporcional es minimizar el error; idealmente, este debería ser cero, pero eso no es lo que sucede con la mayoría de las variables controladas en la vida real (como temperatura, flujo, presión o torque).
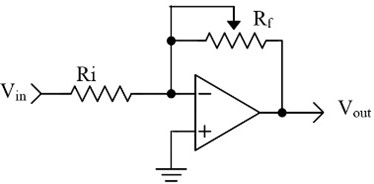
Figura 3. Diagrama de un control proporcional con amplificador operacional.
Fuente: Dahlen, A. (2005). Nuts and volts.Recuperado de
https://www.nutsvolts.com/magazine/article/the_pid_controller_part_1
Control proporcional integral derivativo (PID). De acuerdo con National Instruments (2023), la noción fundamental de un controlador PID consiste en la lectura de un sensor, seguida de la determinación de la salida deseada para el actuador. Esto se logra mediante el cálculo de las respuestas proporcional, integral y derivada; posteriormente, se realiza la suma de estos tres elementos con el fin de obtener la salida requerida. En la figura 4, se muestra el desarrollo de control de un motor de corriente directa, en el cual se emplea un controlador analógico con base en amplificadores operacionales.
Respuesta proporcional. El elemento proporcional se basa, exclusivamente, en la diferencia entre el punto de referencia y la variable del proceso, denominada "error". La ganancia proporcional (Kc) establece una relación entre la respuesta de salida y la señal de error.
Respuesta integral. En palabras de Armenta (2022), en un controlador PI, la integración matemática se aplica mediante un control proporcional, ya que esta opción reduce aún más el desplazamiento. La parte integral ajusta la respuesta del controlador basándose en información histórica sobre el error.
Respuesta derivativa. Matemáticamente, una derivada describe la pendiente de una curva, la cual representa una estimación de una variable. Un controlador PD combina control proporcional con una predicción del error, así que la derivada de la curva de error equivale a dicho pronóstico.
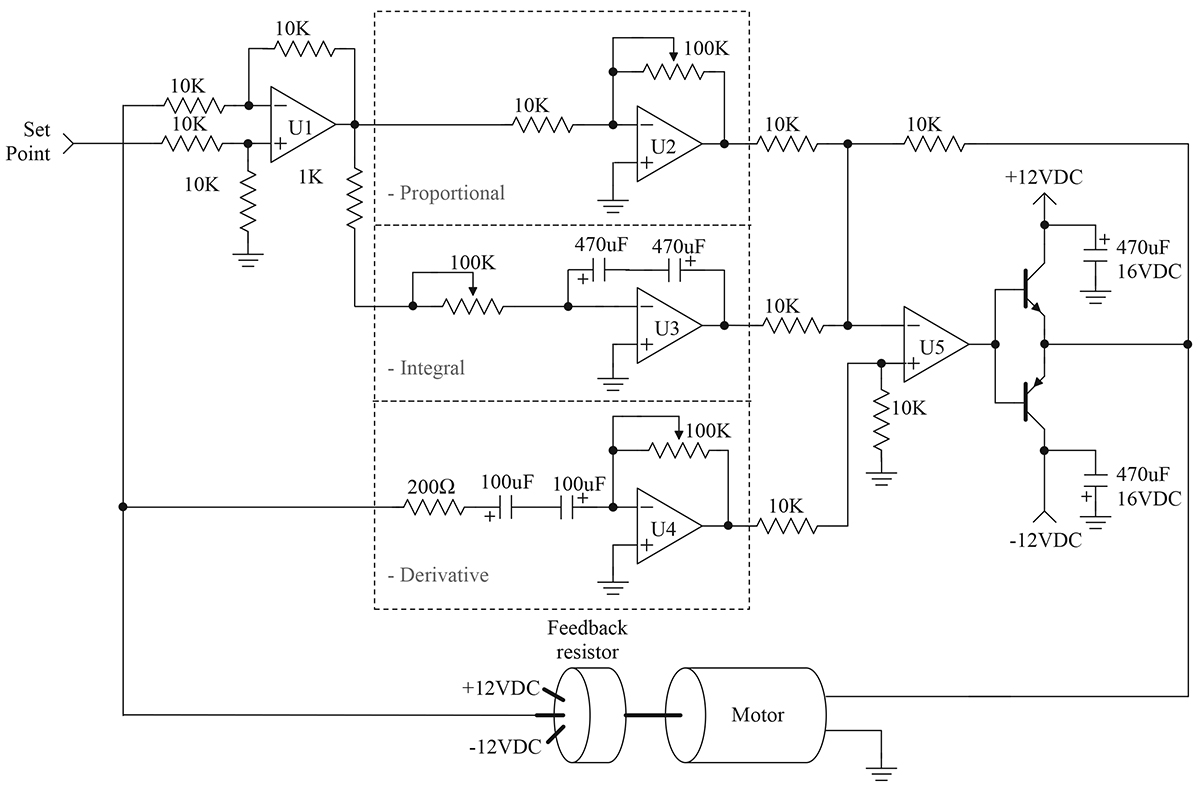
Figura 4. Diagrama de un control PID con amplificador operacional para un motor de CD.
Fuente: Dahlen, A. (2005). Nuts and volts. Recuperado de https://www.nutsvolts.com/magazine/article/the_pid_controller_part_1
Detección de fallas y protección
En sistemas de control, alimentación y procesos de fabricación, la detección de fallas y protección es un campo de aplicación para los amplificadores operacionales; usados en configuración a manera de comparadores, estas herramientas permiten la detección de una variable de proceso de un valor establecido, por ejemplo, sobrecorriente en un circuito de alimentación o desvío en la trayectoria de un elemento u objeto. El principio de funcionamiento se basa en que se fija un valor de referencia, el cual indica cómo debe ser la operación normal en los sistemas de control; entonces, ante cualquier tipo de desviación, se dispara una señal de voltaje que será usada para accionar un interruptor de paro, un dispositivo cortacorriente o, en algunos casos, un sistema que pueda mitigar el daño.
